Infrastructure
Guided tour of the RobotLab LTH
Associate Professors Yiannis Karayiannidis and Björn Olofsson show some of the robots.
Meet the Robots
SPOT Robot
Spot is Boston Dynamic’s first commercially available robot. It is a quadruped robot with its own sensor package for local navigation and obstacle avoidance. The robot is designed to encapsulate low level functions such as motor control, leg kinematics, collision avoidance, movement and odometry. This allows users to focus on the high level applications without worrying about hardware and control details such as the inertial measurement unit for odometry, or PID gains set on the motors for accurate movement. SPOT comes with a Velodyne VLP-16 LIDAR, 5 stereo depth cameras with 360° field of view, 4m range overall and 90 minute runtime per battery. Since recently, SPOT has an arm.

Heron Robot
Heron is based on a MIR200 mobile industrial robot and a UR5e industrial manipulator. The robot can use multiple different grippers. It has a wrist Intel RealSense D415 camera and multiple SICK LIDARs for navigation. It has sufficient on-board computational resources for performing tasks autonomously. The battery has sufficient energy for more than 5 hours.

Dual-Arm KUKA Robot
The Dual-Arm KUKA Robot consists of two LBR IIWA 7 R800 robots on a torso such that the robot can use its two arms similar to a human worker. The robot has two Intel RealSense D415 cameras at the wrists. One arm usually has a Robotiq 3-Finger gripper connected to it but both arms can be equipped with any other gripper and according to demand.
The robot is equipped with suitable computational resources, and it has been used in our now completed H2020 project Scalable for engine assembly.

ABB Frida and YuMi Robots
The lab has two dual-armed robots from ABB, the prototype Frida and the commercial YuMi. Both robots have seven joints in each arm, and the robots are used for research on force control and human-robot interaction, e.g., in assembly tasks. YuMi has integrated cameras in the grippers and the arms have been equipped with wrist-mounted force/torque sensors.
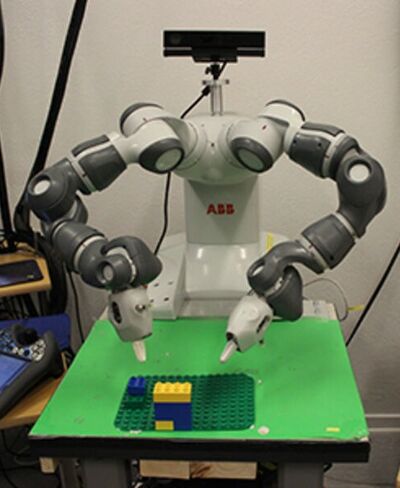
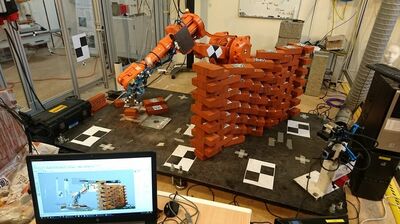
ABB IRB Robots
The lab has four general-purpose industrial robot arms from ABB, one IRB2400, two IRB140, and one IRB120. These robots are used for research on sensor-based motion planning and control, as well as for several different applications such as assembly, milling, construction robotics, and 3D printing. The robots can be equipped with various actuators and sensors such as force/torque and vision.
Bettan Mobile Construction Robot

L3 Parallel-Kinematic Manipulator

Franka Emika Panda Robot
Sleipner Mobile Robot
Open Door
We are opening our doors and giving you the opportunity to make use of our state-of-the-art equipment, facilities and network.